|
A.
無人飛機導控技術
(1) 自主飛行電腦:已經過100km跨海飛行和4000m大氣溫濕度任務執行成功,2012年已商品化技轉雷隼科技(股)公司。
(2) 地面導控站系統:配合自主飛行電腦發展,本(技術)產品亦同時設計和經過三版本的改善,在2012年商品化技轉給雷隼科技和經緯衛星資訊。
圖1.1地面導控站系統
(3)
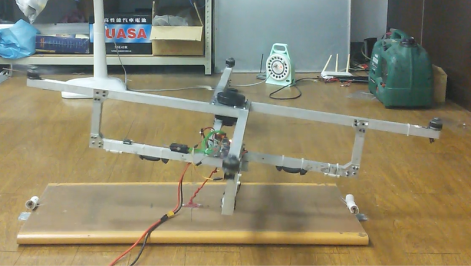
天線自動追蹤系統:為了提高無人飛機的導航控制距離,使用高增益的指向形天線,搭配天線旋轉台與地面導航控制站軟體所建構的系統。從接收回傳的飛行資料與遙測資料,來推估地面站與UAV的相對的位置,計算天線旋轉台所需指向的方位角(Azimuth
angle)與仰角(Elevation
angle),藉此提高導控距離。本(技術)產品配合自主飛行電腦發展,也於2012年商品化技轉給雷隼科技(股)公司和經緯衛星資訊(股)公司。
圖1.2天線自動追蹤系統
(4) 多機導控系統:此為執行中科院計畫的成果,相當具有戰術價值,尤其對電動飛機的軍事運用。
圖1.3多機導控系統
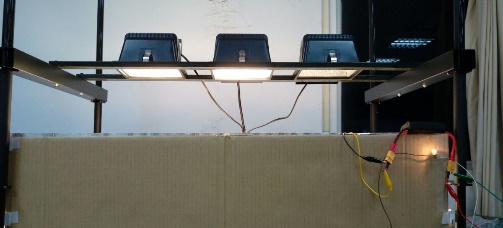
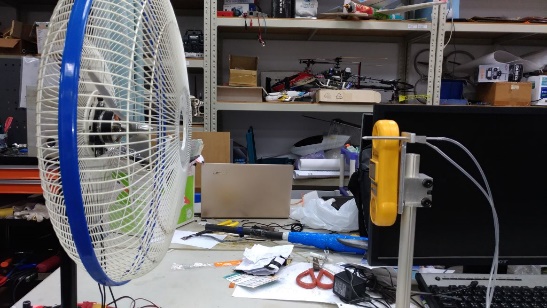
(5) 車載供電之電動飛機系統:著眼於電動飛機的續航力不足,而且民航局對於無人飛機的管制趨嚴,尤其在重要交通建設附近,根本不允許無人飛機的飛行。因此本實驗室開始研發車載供電電動飛機系統的動力,飛機由地面電纜線傳輸電力滯空保持在25~50m高,有別於目前國內除固定翼和旋翼無人飛機外,任務執行時可以多一種選擇。此系統的構想由以色列Skysapience公司所提出的HoverMast多旋翼系統。
圖1.4 HoverMast實驗機
(6)
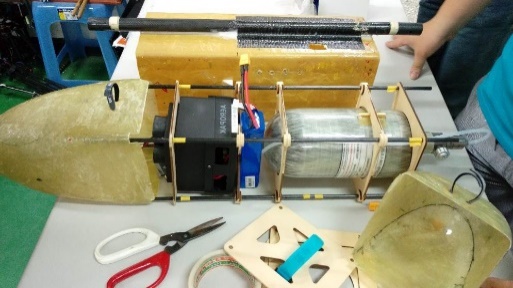
太陽能無人飛機:載具動力的電動化是一個趨勢,從2016年本實驗室除完成100W的燃料電池(Fuel
cell)無人飛機的試飛評估外,以發展長滯空(Long
endurance)太陽能無人飛機為主要研究方向。在2016年完成翼展3公尺重4.5公斤106W太陽能發電與147Wh鋰電池儲能連續飛行6小時紀錄後,2017年與本系師生團隊設計製造一架翼展10m重約25kg的中型太陽能無人飛機,在屏東6月和11月的試飛,完成自主飛行調校和爬升至1300m的紀錄。
圖1.5
3m燃料電池混電能無人機、3m太陽能無人機
圖1.6
10m翼展太陽能無人機1A,
1B和2A機型
|